CLRACING F7 DUAL V2
The Flight Controller for RACERS
Main Features
- MCU: STM32F722RET6216MHz
- DUAL 6-Axis ICM20602Separated Interrupts
- Build in Beta flight OSD
- Up to 8S(36V) direct battery
- Build in Voltage monitoring resistor
- Build in 5V/3A BEC and 3.3V
- Led strip share 5V with 5V/3.0A
- 5V OR VBAT, camera and VTX POWER VIA Pit Switch
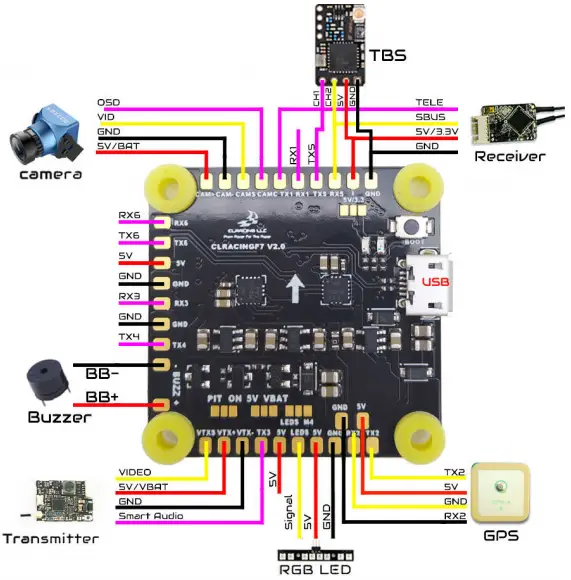
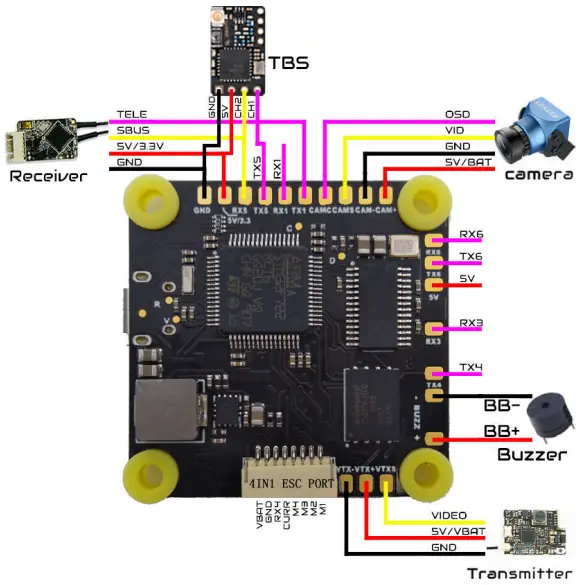
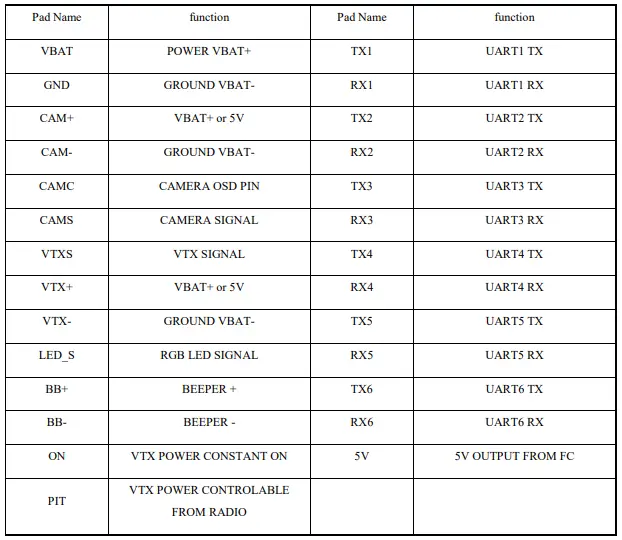
- 6 Full UARTS: UART1, UART2
- Buildin Camera Control pin wi camera connection
- Buzzerpads for external buzzer
- VBAT Polarity protection
- Build in 32MB Blackbox flash chip
- M4 Can be selected either led strip signal or M4 signal for RPM filtering
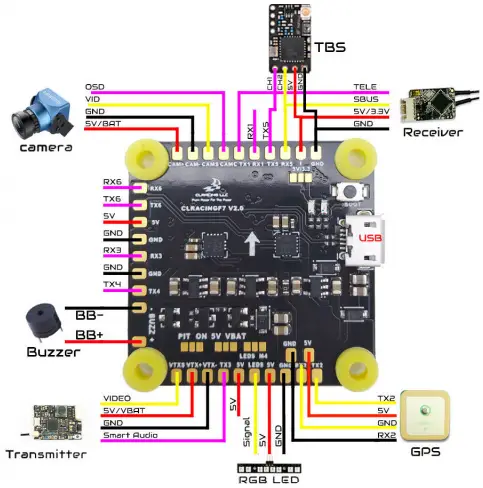
General Overview
- FC TOP VIEW
- FC BOTTOM VIEW
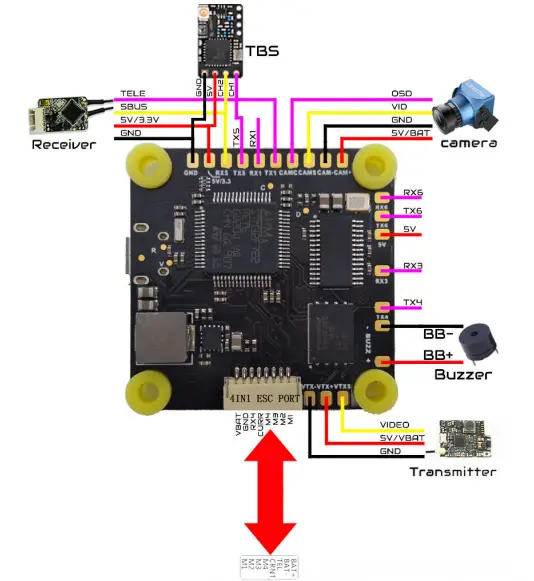
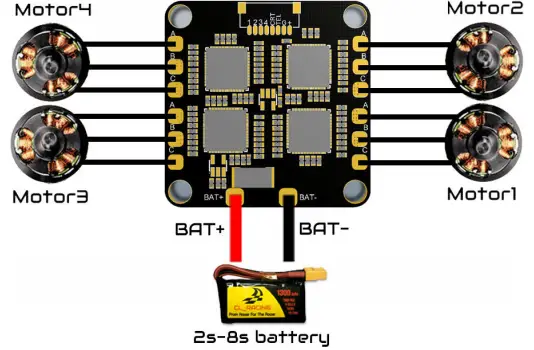
- FC + 4in1 ESC
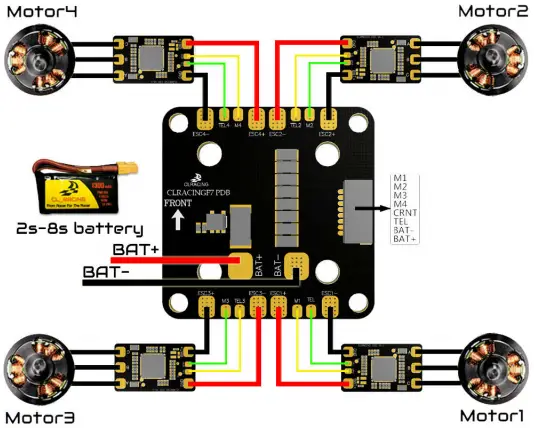 FC + 4in1 ESC
FC + 4in1 ESC
BETAFLIGHT SETUP
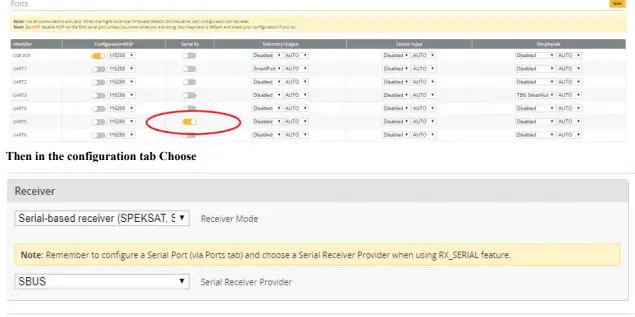
- Sbus
Choose UART 5 AS Serial RX, Solder your sbus signal to RX5 pad
- RX Voltage selection Jumper
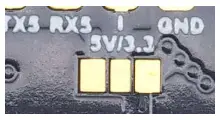
Solder on the left will output 5v , Solder the jumper on the right will output 3.3V - Smart port telemetry
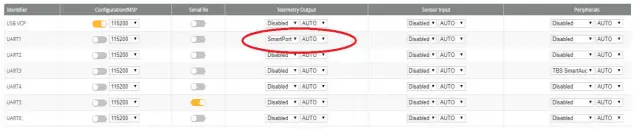
Choose UART1 AS Smart port on the telemetry output, then go to CLI
Enter set tlm_halfduplex = OFF,Save
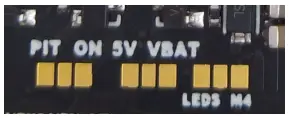
- Use True Pit mode for Team racing
VBAT and 5V jumper control both VTX power and Camera Power
First Solder Jumper pad on PIT side
Then go to CLI Copy the following command to the CLI
resource PINIO 1 A14
set pinio_box = 39,0,0,0
save
wait for the FC reboot then go to “modetab “set VTX PIT MODE on a AUX switch you prefer

CAUTION: when using PIT mode, FC power up will not power your VTX until you turn on the switch on your radio you assigned to the VTX PIT mode - Use LEDS signal for Motor 4 enable RPM filtering
For normal use solder the jumper on the M4 side.
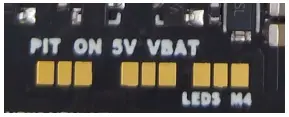
For RPM FILTERING
Solder Jumper pads to the LEDS side, LEDS pad will be output as motor 4.
In the CLI type in
resource MOTOR 4 none
resource LEDS_STRIP 1 none
resource motor 8 none
resource MOTOR 4 B01
save
now you can go ahead use the RPM filtering setting from BF wiki to enable RPM filtering feature